this class is used To Detect circles in an image More...
 Inheritance diagram for ImageProcessor::DetectCircle:
Inheritance diagram for ImageProcessor::DetectCircle: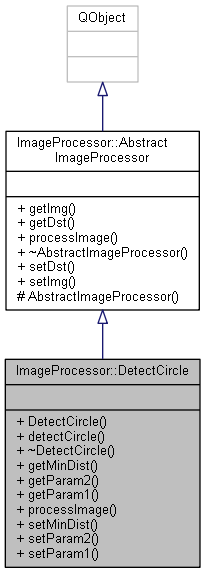 Collaboration diagram for ImageProcessor::DetectCircle:
Collaboration diagram for ImageProcessor::DetectCircle: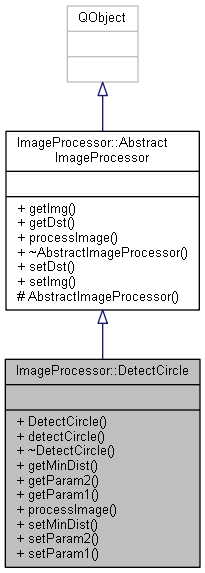
Classes | |
| class | _DetectCircleImpl |
Public Slots | |
| void | setMinDist (int value) |
| sets the minimum value between two circles More... | |
| void | setParam2 (int value) |
| void | setParam1 (int value) |
| Public Slots inherited from ImageProcessor::AbstractImageProcessor | |
| virtual void | setDst (const cv::Mat &dst) |
| sets The output of the operation More... | |
| virtual void | setImg (const cv::Mat &img) |
Signals | |
| void | circlesDetected (const std::vector< cv::Vec3f > &) |
| this signal is emitted after detecting All the circles in the image being processed. More... | |
| Signals inherited from ImageProcessor::AbstractImageProcessor | |
| void | imageChanged (const cv::Mat &img) |
| this Signal Is Emited When the source cv::Mat Object Changed. | |
| void | dstChanged (const cv::Mat &img) |
| this Signal Is Emited When the destnation cv::Mat Object Changed. example: More... | |
Public Member Functions | |
| DetectCircle (QObject *parent=nullptr) | |
| std::vector< cv::Vec3f > | detectCircle () const |
| this helper Function is used to detect circles in an Image using HoughCircle Algorithm. More... | |
| int | getMinDist () const |
| int | getParam2 () const |
| int | getParam1 () const |
| QVariant | processImage () override |
| reimplemented Function. More... | |
| Public Member Functions inherited from ImageProcessor::AbstractImageProcessor | |
| cv::Mat | getImg () const |
| AbstractImageProcessor::getImg. More... | |
| cv::Mat | getDst () const |
| returns A cv::Mat Object which represents the output of the image processing operation More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from ImageProcessor::AbstractImageProcessor | |
| AbstractImageProcessor (QObject *parent=nullptr) | |
| accpets A pointer To the Parent Class For The Qt Meta-object Model See Qt Meta-Object More... | |
Detailed Description
this class is used To Detect circles in an image
using this class you can detect x, y and radius of a circle in an image after calling DetectColor::processImage there are many possible ways to get The output for example you can connect the signal ImageProcessor::DetectCircle::circlesDetected to any QObject Slot that takes std::vector<cv::Vec3f> as a parameter another way is to use the return of processImage and convert the QVarient to std::vector<cv::Vec3f>
Definition at line 12 of file detectcircle.h.
Member Function Documentation
◆ circlesDetected
|
signal |
this signal is emitted after detecting All the circles in the image being processed.
can Be connected with other objects to get the circles in an image.
◆ detectCircle()
| std::vector< cv::Vec3f > DetectCircle::detectCircle | ( | ) | const |
this helper Function is used to detect circles in an Image using HoughCircle Algorithm.
- Returns
- a vector of 3 points vector each represents the x, y, r of all circles in the image.
- See also
- ImageProcessor::DetectCirlce::processImage.
Definition at line 66 of file detectcircle.cpp.
◆ processImage()
|
overridevirtual |
reimplemented Function.
this function is reimplented to process a thresholded image of grayscale type to Detect All Cirlces.
- Returns
- std::vector<cv::Vec3f> a vector of cv::Vec3f where each index in it represents a circle which centers are x, y and radius. using circleVec = std::vector<cv::Vec3f>;auto i = circleDetector.processImage().value<circleVec>();for(auto a : i){qDebug() << "x = " << a[0] << ", y = " << a[1] << ", r = " << a[2]; //should iterate on each element and prints it's x, y, and radius.}
Implements ImageProcessor::AbstractImageProcessor.
Definition at line 51 of file detectcircle.cpp.
Here is the call graph for this function:
◆ setMinDist
|
slot |
sets the minimum value between two circles
- Parameters
-
value
- See also
- ImageProcessor::DetectCircle::getMinDist
Definition at line 14 of file detectcircle.cpp.
The documentation for this class was generated from the following files:
- object-detector/src/CircleDetector/ImageProcessors/ImageProcessor/detectcircle.h
- object-detector/src/CircleDetector/ImageProcessors/ImageProcessor/detectcircle.cpp
